Abstrak
- Kemajuan teknologi terkini telah memungkinkan para ahli ekologi untuk mempelajari pergerakan hewan yang lebih kecil, termasuk serangga, menggunakan metode pelacakan jarak jauh, seperti teknologi frekuensi sangat tinggi (VHF). Teknologi pelacakan VHF memungkinkan kita untuk mempelajari pola migrasi, perilaku spasial, dan distribusi spesies yang relevan secara ekologis, sehingga mendukung pengembangan strategi konservasi yang efektif.
- Kami menerapkan pemancar VHF pada dua spesies lebah tukang kayu Eropa, Xylocopa valga dan Xylocopa violacea , dan menetapkan pendekatan pelacakan jarak jauh untuk serangga <1 g. Kami mempelajari efek tag pada perilaku terbang spesies dan pola pergerakan mereka dalam lanskap padang rumput terbuka di Eropa Tengah.
- Kami memberikan deskripsi terperinci tentang penerapan pemancar mini pada tubuh dorsal lebah dan panduan langkah demi langkah mulai dari pembelian material hingga pembuatan penerima stasioner. Kami membahas potensi jebakan teknologi yang diterapkan dan cara mengatasinya di lapangan. Lebih lanjut, kami menyediakan kumpulan data dan skrip untuk memproses informasi yang dikumpulkan oleh penerima dengan perangkat lunak sumber terbuka.
- Studi kami menunjukkan bahwa pemancar VHF mini, dikombinasikan dengan penerima stasioner, merupakan alat yang ampuh untuk penelitian pergerakan serangga. Akan tetapi, ahli ekologi harus sangat berhati-hati dalam memilih area studi dan hewan target serta dalam menganalisis data.
1. PENDAHULUAN
Pergerakan hewan dalam berbagai skala spasial sangat penting untuk memahami pola migrasi, wilayah jelajah, jaringan ekologi, dan respons terhadap perubahan lingkungan (Dupont et al., 2014 ; Mola & Williams, 2019 ; Wittemyer et al., 2019 ). Secara historis, studi pergerakan hewan terutama berfokus pada hewan yang relatif besar, seperti burung atau mamalia, tetapi kemajuan teknologi terkini memungkinkan kita untuk menyelidiki pergerakan hewan yang lebih kecil, seperti serangga <1 g (Kissling et al., 2014 ; Tomkiewicz et al., 2010) . ).
Lebah liar adalah penyerbuk penting dan memainkan peran kunci dalam ekosistem dengan menjaga keanekaragaman hayati lokal dan ketahanan ekosistem (Klein et al., 2007 ; Ollerton et al., 2011 ). Namun, penelitian terbaru mengungkapkan penurunan keanekaragaman dan kelimpahan lebah liar, baik pada tingkat populasi maupun komunitas, yang menyebabkan efek berjenjang negatif bagi organisme pada tingkat trofik lain, misalnya, untuk spesies tanaman tertentu yang bergantung pada spesies lebah khusus untuk penyerbukan yang efektif (Biesmeijer et al., 2006 ; van der Sluijs, 2020 ). Penggerak utama penurunan ini adalah hilangnya habitat, degradasi, dan fragmentasi karena gangguan antropogenik, seperti intensifikasi pertanian (Bommarco et al., 2010 ; Olynyk et al., 2021 ; Potts et al., 2010 ).
Meskipun mobilitasnya tinggi, lebah memiliki jangkauan mencari makan yang terbatas (100–1000 m), yang terkait dengan ukuran tubuh spesifik spesies (Greenleaf et al., 2007 ; Zurbuchen et al., 2010 ). Ukuran jangkauan mencari makan mereka sering kali tetap di bawah jarak terbang maksimum dan menentukan ukuran habitat yang mereka manfaatkan (Gathmann & Tscharntke, 2002 ; Kendall et al., 2022 ; Zurbuchen et al., 2010 ). Mengakses sumber daya penting, seperti lokasi bersarang dan tanaman untuk mencari makan, terhambat oleh fragmentasi lanskap, yang pada gilirannya secara signifikan mengurangi aliran gen (Redhead et al., 2016 ; Wagner, 2020 ).
Oleh karena itu, memahami preferensi habitat spesifik spesies lebah liar sangat penting untuk mengembangkan strategi konservasi yang efektif dan mengurangi penurunan yang terus terjadi. Spesies lebah yang paling sering dipelajari menggunakan metode pelacakan adalah lebah madu yang dikelola ( Apis mellifera L. 1758) dan Bombus terrestris (L., 1785). Spesies soliter—mayoritas dari sekitar 20.000 spesies lebah di seluruh dunia (Michener, 2000 )—sebagian besar diabaikan dalam studi pelacakan sejauh ini, kecuali lebah tukang kayu Afrika (Pasquet et al., 2008 ) dan beberapa spesies lebah anggrek neotropis (Wikelski et al., 2010) ). Pemahaman kita tentang ekologi spasial sebagian besar spesies lebah liar masih terbatas karena bergantung pada ukuran tidak langsung dan kekurangan perangkat pelacakan tradisional. Tag frekuensi sangat tinggi (VHF) miniatur menawarkan pendekatan yang menjanjikan untuk mempelajari dinamika populasi lebah liar, pola migrasi, dan ekologi pergerakan.
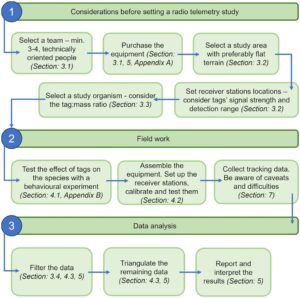
Di sini, kami menyajikan alur kerja yang komprehensif (Gambar 1 ) untuk melacak pergerakan dua spesies lebah soliter <1 g: Xylocopa violacea (L., 1758) dan Xylocopa valga (Gerstaecker, 1872). Spesies ini termasuk di antara lebah liar Eropa terbesar dan dapat membawa tag 0,18 g. Spesies target berasal dari Eropa Tengah dan penyerbuk penting tanaman liar, terutama Lamiaceae dan Fabaceae, yang merupakan sumber makanan favorit (Westrich, 2018 ). Kami membahas tantangan dan potensi jebakan yang terkait dengan pendekatan ini. Kami juga menguji potensi efek kemampuan lebah untuk terbang, karena berat ekstra dapat memengaruhi perilaku mereka, yang sering kali diabaikan (Batsleer et al., 2020 ).
2 PENJELASAN METODE
Metode pelacakan VHF tradisional, yang melibatkan penerima genggam dan antena (Gambar 2 ), memerlukan pelacakan spesies target dengan berjalan kaki, menggunakan perahu (Wikelski et al., 2010 ), mobil atau pesawat terbang (Hagen et al., 2011 ; Pasquet et al., 2008 ). Bahasa Indonesia: Sementara tag VHF telah menjadi lebih kecil dan ringan untuk melacak serangga terbang <1 g, seperti lebah (Cavigliasso et al., 2020 ; Hagen et al., 2011 ; Wikelski et al., 2010 ), tawon (Batsleer et al., 2020 ; Kennedy et al., 2018 ), kupu-kupu (Fisher et al., 2020 ; Wang et al., 2019 ), ngengat (Liégeois et al., 2016 ), capung (Levett & Walls, 2011 ; Wikelski et al., 2006 ), jangkrik semak (Fornoff et al., 2012 ) dan kumbang (Al Ansi et al., 2020 ; Hedin & Ranius, 2002 ; Moore-O’Leary et al., 2017 ; Růžičková & Elek, 2023 ), pendekatan ini padat karya, dapat mengganggu satwa liar dengan memasuki habitat perkembangbiakan tanpa izin dan biasanya menghasilkan ukuran sampel yang rendah karena keterbatasan sumber daya teknis dan manusia (Fisher et al., 2021 ; Ward et al., 2013 ). Melacak beberapa individu secara bersamaan dengan resolusi temporal dan spasial yang tinggi sangat menantang, jika tidak mustahil jika dilakukan secara manual. Lebah, misalnya, dapat menutupi area yang luas selama penerbangan rutin, merupakan penerbang cepat, dan bahkan spesies lebah (0,5–1 g) tidak selalu dapat dilacak secara visual (Kissling et al., 2014 ). Dalam kebanyakan kasus, jarak mencari makan rata-rata, misalnya lebah, adalah sekitar 1 km, dengan jarak maksimum rata-rata 9 km (Kendall et al., 2022 ).

Bahasa Indonesia: Sementara Sistem Satelit Navigator Global (GNSS) telah mengatasi tantangan ini dan merevolusi ekologi pergerakan vertebrata (Kays et al., 2015 ), berat perangkat GNSS tetap menjadi kendala karena konsumsi dayanya yang relatif tinggi. Saat ini, tag GNSS paling ringan yang tersedia secara komersial (misalnya NanoFix Geo Mini 0,88 g; PathTrack, 2024 ) masih terlalu berat untuk sebagian besar spesies serangga (Cagnacci et al., 2010 ; Hebblewhite & Haydon, 2010 ). Sistem ATLAS GPS terbalik kemungkinan merupakan sistem yang paling tepat dan akurat untuk studi skala halus. Ini memberikan data lokasi spasiotemporal yang sangat akurat (5,7 m dibandingkan dengan GNSS dalam target bergerak; Beardsworth et al., 2022 ). Namun, kelemahan utama adalah massa tag, yang lebih berat daripada lebah liar (tag 0,6 g + baterai CR2032 3 g; Beardsworth et al., 2022 ). Tag identifikasi frekuensi radio (RFID) lebih ringan, tetapi jangkauannya terbatas hingga beberapa meter (Kissling et al., 2014 ). Tag Radar Harmonik lebih ringan (0,6–2 g), tetapi individu tidak dapat dibedakan, peralatannya mahal, dan perawatannya terbatas dan rumit (Kissling et al., 2014 ; Mola & Williams, 2019 ).
Untuk mengatasi tantangan ini dan memanfaatkan jangkauan panjang tag VHF ringan sambil tetap menghasilkan data pergerakan yang akurat secara spasiotemporal, Sistem Telemetri Radio Otomatis (ARTS) telah dikembangkan. Misalnya, sistem MOTUS telah dirancang untuk analisis skala regional atau kontinental dari pola pergerakan dan migrasi skala besar pada hewan dengan jangkauan deteksi hingga beberapa kilometer (Taylor et al., 2017 ). Untuk aplikasi skala lokal dan tag ringan, Fisher et al. ( 2021 ) mengusulkan penggunaan unit penerima otomatis Lotek (SRX800-D, Lotek Wireless, Wareham, Inggris), sedangkan Gottwald et al. ( 2019 ) mengusulkan sistem yang sepenuhnya didasarkan pada komponen sumber terbuka yang murah dengan jangkauan deteksi beberapa ratus meter yang menjadi fokus kami di sini (tRackit di github: https://github.com/Nature40/tRackIT ).
Tag VHF memancarkan sinyal radio pada frekuensi radio yang khas, yang dapat dideteksi secara individual oleh antena pada jarak hingga beberapa ratus meter (Batsleer et al., 2020 ). Posisi individu yang ditandai dapat diperkirakan dengan melakukan triangulasi beberapa arah kompas. Dengan demikian, kekuatan sinyal yang diterima berfungsi sebagai ukuran jarak perkiraan (Garton et al., 2001 ; Kenward, 2000 ). Tidak seperti pelacakan manual, di mana seseorang berbalik untuk menentukan arah sinyal masuk yang terkuat, penerima stasioner otomatis dapat dilengkapi dengan beberapa antena (biasanya 3–4 antena terarah) yang mengarah secara merata di 360°. Membandingkan dua sinyal terkuat yang diterima secara bersamaan memungkinkan estimasi arah kompas tag (Kays et al., 2011 ). Menggunakan arah dari dua atau lebih stasiun penerima dengan rentang deteksi yang tumpang tindih, posisi individu diperkirakan.
3 HAL YANG PERLU DIPERTIMBANGKAN SEBELUM MENGGUNAKAN TAG VHF PADA LEBAH
3.1 Pilih tim dan beli peralatan
Melacak lebah <1 g menggunakan ARTS merupakan tugas rumit yang memerlukan upaya tim. Menyiapkan stasiun penerima biasanya melibatkan setidaknya tiga orang, dengan satu orang idealnya memiliki keahlian dalam teknik listrik. Tim yang terlatih dengan baik dapat menyiapkan satu stasiun penerima mandiri dalam waktu sekitar 2–3 jam. Untuk memaksimalkan efisiensi, pertimbangkan untuk menggunakan struktur tinggi yang ada untuk penempatan antena, dan pastikan bahwa anggota tim percaya diri dalam bekerja di ketinggian. Jika Anda memilih struktur yang ada, waspadai potensi efek bahan magnetik dalam struktur tersebut, yang dapat memengaruhi jangkauan deteksi dan pola deteksi. Selain itu, struktur di sekitar stasiun penerima dapat mengubah pola deteksi. Jangkauan deteksi dapat dievaluasi dengan berbagai cara. Pendekatan kami melibatkan perputaran stasiun penerima dan pengukuran kekuatan sinyal pemancar uji. Metode lain yang lebih luas mencakup, misalnya, penggunaan sejumlah titik kalibrasi (Tyson et al., 2024 ) dan membandingkan akurasi dengan perangkat GNSS (Beardsworth et al., 2022 ). Sebelum proses penyiapan, penting untuk memperoleh peralatan yang diperlukan (Lampiran S1 ). Kami sarankan untuk berinvestasi pada komponen listrik berkualitas tinggi guna meminimalkan pemecahan masalah yang memakan waktu selama musim lapangan. Untuk pekerjaan ini, tidak diperlukan persetujuan etis dan izin kerja lapangan (A4/NR.AB-10122-10-2024) untuk memasuki area taman nasional diberikan oleh negara bagian federal Burgenland.
3.2 Pilih area studi
Saat memilih area studi dan lokasi potensial untuk memasang stasiun penerima, seseorang perlu mempertimbangkan medan dan vegetasi dengan saksama. Struktur lanskap dan vegetasinya dapat mengganggu sinyal tag, sehingga kurang terdeteksi oleh stasiun penerima. Selain itu, pertimbangkan potensi efek pantulan dan pantulan sinyal di area yang ditumbuhi vegetasi rapat seperti hutan. Dalam studi kami, ketinggian minimum stasiun penerima adalah 7 m (hingga 15 m) di atas tanah untuk mengurangi redaman sinyal. Penempatan antena yang lebih tinggi umumnya meningkatkan jangkauan deteksi sinyal secara logaritmik. Namun, manfaat ini harus ditimbang terhadap peningkatan biaya material (tiang, tripod), kesulitan pemasangan, dan kerentanan terhadap cuaca buruk (misalnya badai).
Bahasa Indonesia: Untuk memutuskan lokasi stasiun penerima, terutama jarak di antara mereka, seseorang perlu mempertimbangkan banyak faktor seperti jangkauan deteksi, jenis tag dan kekuatan sinyalnya, dan faktor-faktor terkait lainnya seperti yang tercantum di atas. Lokasi penerima pada akhirnya akan memengaruhi seberapa baik data yang direkam dapat dianalisis (triangulasi) dan menyediakan dasar untuk pemodelan spasial lebih lanjut. Hanya tag aktif terkecil dan teringan yang direkomendasikan untuk lebah <1 g untuk mengurangi berat tambahan sebanyak mungkin. Namun, kekuatan sinyal perangkat ringan berkurang dibandingkan dengan tag yang lebih berat yang digunakan untuk hewan >10 g seperti vertebrata. Misalnya, tag dengan kekuatan sinyal 600 μW memiliki masa pakai baterai 8 hari dan massa 0,38 g, sedangkan tag dengan kekuatan sinyal 300 μW memiliki masa pakai baterai 8 hari dan massa 0,26 g (Plecotus Solutions, 2024 ). Kepadatan jaringan penerima merupakan pertukaran antara keakuratan dan jangkauan deteksi (yakni jaringan yang lebih besar dapat mencakup area yang lebih luas, sedangkan jaringan yang lebih rapat meningkatkan keakuratan).
Banyak peneliti bertujuan untuk menafsirkan temuan mereka dalam konteks yang lebih luas, berusaha untuk menghubungkan hasil area studi tertentu dengan fenomena skala yang lebih besar, seperti perilaku spesies. Sementara studi GNSS, misalnya, dapat melacak hewan melintasi jarak yang sangat jauh, sistem yang disajikan di sini beroperasi pada skala yang lebih kecil (beberapa kilometer persegi) karena jangkauan deteksi yang relatif pendek (100 s m). Akibatnya, jika tujuan penelitian berfokus pada pertanyaan skala luas, tipe habitat dalam area studi harus mewakili wilayah yang lebih luas. Area studi kami mencerminkan agroekosistem yang dikelola secara ekstensif di dataran rendah Austria timur di Taman Nasional “Neusiedler See-Seewinkel” (Gambar 3 ). Medan datar dengan padang rumput kering dan basah, ladang subur dan kebun anggur diselingi dengan struktur berkayu yang mengandung unsur kayu mati, yang merupakan tempat bersarang yang penting bagi spesies Xylocopa . Akhirnya, pertimbangkan izin dari pemilik tanah atau otoritas konservasi untuk menempatkan stasiun penerima di tanah pribadi atau publik.

3.3 Memilih organisme penelitian
Pilihan organisme studi pada akhirnya bergantung pada ukuran dan berat tag yang tersedia. Tag kami (Plecotus Solution GmbH) berbobot 0,18 g (4 × 4 × 3 mm, panjang antena 100 mm) dan berisi baterai isi ulang dengan perkiraan masa pakai lima hari (Lampiran S1 ). Massa tag menantang bagi individu yang membawa beban tambahan, meningkatkan biaya energi (Hagen et al., 2011 ) dan berpotensi mengubah perilaku alami mereka, seperti terbang dan mencari makan. Pada tahun 2022, kami mencoba melacak dua spesies lebah liar lainnya <1 g, Bombus muscorum yang langka (L., 1758; massa rata-rata: 0,13 g; data lapangan sendiri) dan Megachile sculpturalis Smith yang invasif, 1853 (massa rata-rata: 0,33 g; data lapangan sendiri). Tidak ada individu yang ditandai mampu terbang (Rekaman video: https://www.youtube.com/watch?v=AFlKXcprxe8 ).
Bagi lebah madu, tag radar harmonik (0,012 g) yang beratnya kurang dari beban serbuk sari rata-rata adalah beban massa yang dapat diterima (Capaldi et al., 2000 ). Untuk Xylocopa flavorufa (De Geer, 1778), tag seberat 0,35 g, yang merupakan sekitar sepertiga dari massa lebah rata-rata, sudah memadai (Pasquet et al., 2008 ). Lebih jauh, tag paling ringan yang tersedia saat ini adalah 0,06 g dan kompatibel dengan sistem MOTUS (Cellular Tracking Technologies, 2025 ). Namun, penting untuk menilai beban maksimum yang mungkin untuk setiap spesies secara individual sebelum memulai studi telemetri karena dapat menghasilkan bias dalam data pergerakan dengan mengubah perilaku mencari makan spesies, meningkatkan tingkat stres dan pengeluaran energi (Batsleer et al., 2020 ). Oleh karena itu, sangat penting untuk menguji bagaimana dan sejauh mana tag memengaruhi perilaku spesies yang diselidiki dan untuk mempertimbangkan kemungkinan efek tag dalam interpretasi hasil (Batsleer et al., 2020 ).
3.4 Data dan komputasi
Jumlah data bergantung pada jumlah stasiun penerima dan tag yang digunakan. Untuk menganalisis data yang direkam secara efisien, penyaringan yang ketat diperlukan untuk mengurangi biaya komputasi. Kami menggunakan Vienna Scientific Cluster 5 (2,31 PFlop/s, 64 inti dan memori 2 TB per node) untuk melakukan triangulasi arah sinyal. Meskipun kapasitas komputasi ini mungkin tidak penting untuk kumpulan data kecil (yaitu maksimal lima hewan, periode perekaman singkat beberapa jam), kami merekomendasikan penggunaannya untuk kumpulan data besar untuk mempercepat algoritma Markov chain Monte Carlo (MCMC).
4 CONTOH KERJA
4.1 Pengujian efek tag pada spesies lebah <1 g
Dalam studi telemetri dengan serangga, dampak tag pada perilaku terbang tidak dipahami dengan baik, sehingga menyulitkan interpretasi hasil. Di sini (Lampiran S2 untuk deskripsi terperinci), kami menyajikan eksperimen kandang dengan desain pengukuran berulang yang dilakukan dengan 14 individu X. violacea . Pengaturan disesuaikan untuk mendeteksi perbedaan aktivitas terbang (durasi terbang dan jumlah penerbangan) antara individu yang ditandai dan tidak ditandai. Tag radio VHF dengan massa 0,18 g ditempelkan ke sisi dorsal toraks individu menggunakan lem super (Loctite®). Video aktivitas terbang direkam dan dianalisis secara manual. Data dianalisis dengan model campuran linier umum (GLMM) dan analisis deviasi dilakukan dengan fungsi Anova.glmmTMB menggunakan paket-R glmmTMB (Brooks et al., 2017 ). Hasil penelitian menunjukkan bahwa lebah yang diberi tanda terbang lebih jarang ( p < 0,001; χ 2 = 30,25) dan dalam waktu yang lebih singkat ( p < 0,001; χ 2 = 474,04) dibandingkan dengan lebah yang tidak diberi tanda; namun, efek tersebut menurun seiring dengan bertambahnya jumlah lebah ( p < 0,001). Hal ini menunjukkan bahwa pergerakan lebah liar dapat diubah oleh tanda VHF jika tanda terlalu berat.
4.2 Menyiapkan stasiun penerima
Bahasa Indonesia: Ada dua tugas utama saat membangun penerima stasioner ARTS: (1) Menara stasiun itu sendiri, yang terutama terdiri dari tiang aluminium teleskop yang dipasang dengan setidaknya tiga kabel tegangan, tripod opsional, dan empat antena di bagian atas yang sejajar dengan titik mata angin (Gambar 4a,d ). Sistem fotovoltaik (PV) dengan baterai mobil digunakan untuk catu daya (Gambar 4b ). (2) Kotak penerima, seperti yang dijelaskan oleh Gottwald et al. ( 2019 ), mencakup perangkat elektronik (Raspberry Pi, dongle RTLSDR, USB Hub, konverter mata uang) untuk terus menerima dan mencatat sinyal tag (Gambar 4c ). Kami memasang stasiun penerima sedapat mungkin pada struktur tertentu, misalnya, platform observasi (Gambar 4d ).

Sebelum menara penerima dipasang di lapangan (Kotak 1 untuk petunjuk terperinci), kami membuat rangka untuk panel PV (Gambar 4a5 ) yang terhubung ke pengisi daya surya (Gambar 4b3 ). Selanjutnya, kami memerlukan kotak, aki mobil, dan colokan khusus (Gambar 4b1 ; Neutrik waterproof NAC3 MP-HC) yang menghubungkan aki dengan kotak penerima.
KOTAK 1. Langkah-langkah terperinci untuk menyiapkan menara penerima stasioner

Sebelum penerima dapat mencatat sinyal masuk, antena harus dikalibrasi. Salah satu cara sederhana adalah dengan menempatkan tag uji pada posisi tetap sekitar 50 m dari menara. Putar tiang teleskop secara perlahan dan mantap 360° sambil merekam sinyal tag uji untuk mendapatkan kekuatan sinyal maksimum di setiap antena (lihat juga gbr. 3 di Gottwald et al., 2019 ). Membandingkan kekuatan sinyal maksimum ini menghasilkan nilai kalibrasi, yang akan dikurangi dari setiap kekuatan sinyal yang direkam oleh antena masing-masing dalam studi Anda. Sebelum menara beroperasi, menara harus beroperasi selama sehari untuk menilai kemungkinan kebisingan latar belakang, dan pengaturannya mungkin perlu penyesuaian. Namun, tempat yang bising juga dapat ditentukan sebelumnya dengan menggunakan penerima genggam.
Barang-barang untuk membangun menara penerima stasioner yang berdiri sendiri untuk sistem ARTS termasuk kotak penerima tercantum dalam Lampiran S1 dan dapat dipesan secara daring atau di pasar konstruksi. Jika menara penerima dipasang pada struktur tertentu (Gambar 4d ), diperlukan penyesuaian.
4.3 Penyaringan dan triangulasi data mentah
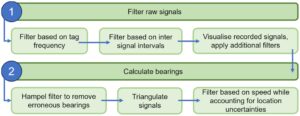
Kami menggunakan proyek sumber terbuka radiotracking.eu pada Raspberry Pis (Gottwald et al., 2019 ). Setiap stasiun penerima merekam frekuensi, kekuatan, durasi, interval antara sinyal berurutan, dan cap waktu untuk sinyal dalam rentang frekuensi 250 kHz yang telah dipilih sebelumnya. Untuk membedakan sinyal aktual dari derau elektromagnetik, kami menerapkan proses penyaringan multitahap yang ketat (Gambar 5 ) berdasarkan metode yang dijelaskan dalam Gottwald et al. ( 2023 ). Pertama, kami menyaring sinyal yang cocok dengan frekuensi tag, yang memungkinkan margin kesalahan ±3 kHz. Selanjutnya, kami menyempurnakan penyaringan dengan mengisolasi sinyal dengan interval antar sinyal antara 0,8 dan 1,2 detik menurut pabrikan. Yang penting, rentang periode pulsa ini bergantung pada laju pulsa dan perlu diminta dari pabrikan. Kami memeriksa data yang difilter secara manual dan menerapkan filter frekuensi dan kekuatan sinyal tambahan karena adanya derau elektromagnetik yang berlebihan. Selanjutnya, kami menghitung arah kedatangan (DOA) untuk sinyal di setiap stasiun dengan menerapkan fungsi kosinus pada kekuatan sinyal yang diterima oleh antena tetangga. Kami menghilangkan posisi yang salah menggunakan filter Hampel pada posisi ini (jendela bergulir 10 detik, ambang batas filter median 0,5). Filter Hampel mengganti titik data yang menyimpang lebih dari tiga deviasi standar dari median jendela dengan nilai median (Hampel, 1974 ).
Setelah penyaringan data, kami memperkirakan lokasi lebah tukang kayu menggunakan model telemetri azimuthal (ATM; Gerber et al., 2018 ). Model ini dipilih karena kemampuannya menghitung matriks kovariansi untuk setiap estimasi lokasi. Matriks kovariansi menawarkan penilaian kuantitatif atas ketidakpastian seputar lokasi yang diestimasikan, yang penting untuk memahami keandalan estimasi lokasi ini (Gerber et al., 2018 ). Metode yang lebih sederhana seperti triangulasi dan multilaterasi tidak memiliki tingkat detail ini dalam memperhitungkan kesalahan pengukuran selama pelacakan. Ketidakpastian yang diwakili oleh matriks kovariansi kemudian digunakan dalam analisis pergerakan lebih lanjut (Fleming et al., 2021 ). Kami menggabungkan rentang deteksi maksimum setiap stasiun penerima, yang sebelumnya ditentukan selama uji akurasi, sebagai prior di ATM. Kami merekomendasikan pengaturan prior agar relatif tidak informatif (yaitu tidak menggunakan rentang deteksi yang terlalu sempit), karena ini mengurangi pengaruhnya pada estimasi lokasi posterior (Hadfield, 2010 ). Pendekatan MCMC dengan 10.000 iterasi digunakan, membuang 2000 iterasi awal sebagai periode burn-in. Kami memeriksa konvergensi rantai menggunakan plot jejak. Untuk menghilangkan estimasi lokasi yang salah, kami menghitung kecepatan terbang lebah tukang kayu menggunakan fungsi ‘outlie’ dalam paket R “ctmm” (Fleming et al., 2023 ). Paket ini sangat cocok untuk memperkirakan kecepatan gerakan sambil memperhitungkan ketidakpastian lokasi. Estimasi lokasi yang menunjukkan kecepatan terbang yang melebihi 14 ms −1 dihilangkan, karena ini mewakili ambang batas yang kami tentukan untuk kecepatan terbang maksimum yang masuk akal dari lebah tukang kayu. Ambang batas kecepatan maksimum yang masuk akal ini harus disesuaikan dengan spesies studi tertentu.
5 HASIL STUDI KASUS LAPANGAN DAN ARAHAN UNTUK ANALISIS SELANJUTNYA
Dari 15 individu lebah tukang kayu yang ditandai, delapan berhasil dilacak oleh setidaknya satu penerima otomatis. Setelah melakukan triangulasi dan penyaringan, kami memperoleh 3605 estimasi lokasi. Kami menyediakan data sampel dari 1561 estimasi lokasi awal untuk satu individu. Setelah penyaringan, estimasi ini dikurangi menjadi dua estimasi lokasi. Pengurangan signifikan dalam estimasi lokasi setelah penyaringan kemungkinan disebabkan oleh jarak yang jauh antara stasiun penerima kami, yang menyebabkan triangulasi bantalan yang jarang dan akibatnya, estimasi yang tidak disaring menjadi buruk. Jadi, kami sarankan untuk menempatkan stasiun penerima lebih dekat daripada dalam penelitian kami. Skrip R beranotasi untuk proses triangulasi dan penyaringan tersedia di https://figshare.com/s/9bff9e6da58b1f9c2fc7 .
Estimasi triangulasi dapat digunakan untuk analisis lebih lanjut. Beberapa paket R memfasilitasi hal ini, termasuk ‘anipaths’ (Scharf et al., 2025 ) untuk memvisualisasikan jejak pergerakan, dan paket seperti ‘crawl’ (Johnson et al., 2008 ), ‘ctmm’ (Fleming et al., 2023 ), dan ‘move2’ (Kranstauber et al., 2024 ) untuk memodelkan proses pengambilan sampel diskret dalam waktu berkelanjutan. Model-model ini memungkinkan, misalnya, kalkulasi rentang jelajah dan penggunaan habitat. Untuk informasi terperinci, kami merekomendasikan CRAN Task View: Processing and Analysis of Tracking Data (Joo & Basille, 2023 ).
5.1 Kemungkinan dan perkembangan lainnya
Metode yang dijelaskan di sini dapat dengan mudah diterapkan pada semua serangga yang dapat membawa tanda dan sistem yang dapat merekam VHF pada empat antena. Kemungkinan lain untuk memanfaatkan metode ini adalah penerapannya pada spesies target lain dengan ukuran yang sama. Pelacakan vertebrata kecil, seperti amfibi (Altobelli et al., 2022 ; Beck et al., 2017 ) atau mamalia kecil (Wallace et al., 2022 ) juga memungkinkan.
Dari sudut pandang teknis, antena Yagi atau omnidirectional merupakan alternatif untuk antena H. Kami menggunakan antena Yagi HB9CV dipol dengan dua elemen penggerak, bukan antena Yagi terarah 2 elemen, karena antena tersebut menyediakan lobus yang sebagian besar tumpang tindih dan bersudut lebar. Lobus yang tumpang tindih memungkinkan perbandingan kekuatan sinyal pada antena yang berdekatan, sehingga memudahkan perhitungan DOA. Antena Yagi memiliki jangkauan deteksi yang lebih panjang tetapi pola radiasi yang lebih sempit. Dengan demikian, kecil kemungkinannya untuk menerima sinyal pada antena yang berdekatan, yang diperlukan untuk memperkirakan DOA secara akurat. Jika sinyal diterima hanya pada satu antena, bearing hanya dapat memberikan perkiraan kasar arah sinyal. Saat menggunakan antena omnidirectional, kekuatan sinyal radio, bukan bearing, digunakan untuk memperkirakan lokasi hewan (lih. Paxton et al., 2022 ). Namun, memperkirakan lokasi yang akurat dengan pendekatan ini memerlukan jaringan stasiun penerima yang lebih padat dibandingkan dengan yang kami sajikan di sini karena antena omnidirectional memiliki jangkauan deteksi yang lebih pendek daripada antena terarah.
Selain metode yang disajikan di sini, ada beberapa metode lain yang memungkinkan untuk memperkirakan bearing sinyal (misalnya Lenske & Nocera, 2018 ; Ward et al., 2013 ) dan untuk melakukan triangulasi sinyal. Yang paling menonjol, estimasi kemungkinan maksimum telah diterapkan untuk memperkirakan triangulasi data VHF. Kami memilih untuk menerapkan ATM karena lebih baik menggabungkan kesalahan bearing (Gerber et al., 2018 ). Sementara ATM dapat memperkirakan lokasi dari satu bearing, akurasinya meningkat dengan jumlah bearing yang berpotongan dari dua stasiun penerima yang berbeda (Gerber et al., 2018 ).
5.2 Peringatan dan jebakan
Tag dapat memengaruhi perilaku individu, tergantung pada massa individu. Jadi, disarankan untuk menerapkan tag hanya pada individu >0,6 g. Keterbatasan ini mengurangi populasi sampel dan memerlukan interpretasi inferensi yang cermat. Kami menggunakan tag yang dapat diisi ulang dengan masa pakai baterai lima hari. Tag yang tidak dapat diisi ulang mungkin lebih disukai, tetapi biayanya mungkin meningkat karena tidak dapat didaur ulang. Di sisi lain, mengambil tag kecil di lapangan membutuhkan banyak tenaga kerja dan terkadang tidak mungkin karena individu meninggalkan jangkauan deteksi stasiun penerima atau tag terlepas dan hilang. Kami hanya mengambil lima tag (total 15 lebah ditandai), tetapi setelah penggunaan kedua, ini juga tidak ditemukan lagi. Oleh karena itu, ada trade-off antara yang tidak dapat diisi ulang yang lebih murah dan beban kerja yang diperlukan untuk mengambil tag yang dapat diisi ulang di lapangan. Kami akan memilih opsi pertama dalam proyek berikutnya.
Selain berat tag, kepadatan menara, kekuatan sinyal tag, ketinggian penerbangan, dan jumlah data yang disimpan dapat memengaruhi keakuratan pelacakan. Gangguan dari kebisingan latar belakang elektromagnetik dapat menyebabkan sejumlah besar sinyal terekam yang mendistorsi perhitungan posisi dan estimasi lokasi berikutnya. Jika frekuensi tag mendekati frekuensi dengan kebisingan latar belakang yang signifikan, seperti yang dipancarkan oleh pagar listrik dan layanan radio seluler, mungkin sulit untuk menyaring sinyal tag aktual secara efektif dari semua sinyal yang direkam secara otomatis. Karena faktor-faktor yang memengaruhi ini, setidaknya satu anggota tim harus bersiaga untuk memastikan stasiun penerima berfungsi dengan baik, dan untuk mengelola dan memeriksa data lapangan yang dikumpulkan untuk menghindari data yang berisik secara tidak terduga atau tidak ada data sama sekali.
Keakuratan data dapat ditingkatkan dengan meningkatkan kepadatan jaringan stasiun ARTS. Hal ini juga akan menghasilkan estimasi triangulasi yang lebih kuat dengan meningkatkan kemungkinan beberapa arah triangulasi. Akan tetapi, keterbatasan inheren dalam akurasi lokasi stasiun ARTS (akibat ketidakakuratan antena 3–5°) membatasi presisi yang dapat dicapai hingga puluhan meter. Hal ini membuat mustahil, misalnya, untuk membedakan antara pentingnya pohon soliter versus habitat terbuka di sekitarnya untuk penggunaan habitat lebah tukang kayu. Terakhir, biaya peningkatan kepadatan stasiun harus dipertimbangkan.